前沿技术
-
具身人工智能机器人关键技术及发展趋势
2026-04-27
具身人工智能(Embodied Artificial Intelligence)简称具身智能 (Embodied intelligence)。最初,人工智能的研究重点在于通过软件程序实现逻辑推理、知识表示和问题解决等智能行为,忽略了身体和感官经验在智能发展中的关键作用。而具身智能强调机器与物理世界交互的重要性,旨在通过促进软硬件一体化智能体的环境适应性学习和智能行为的演化,解决更多智能系统在现实应用中的问题。
1 具身智能机器人概述
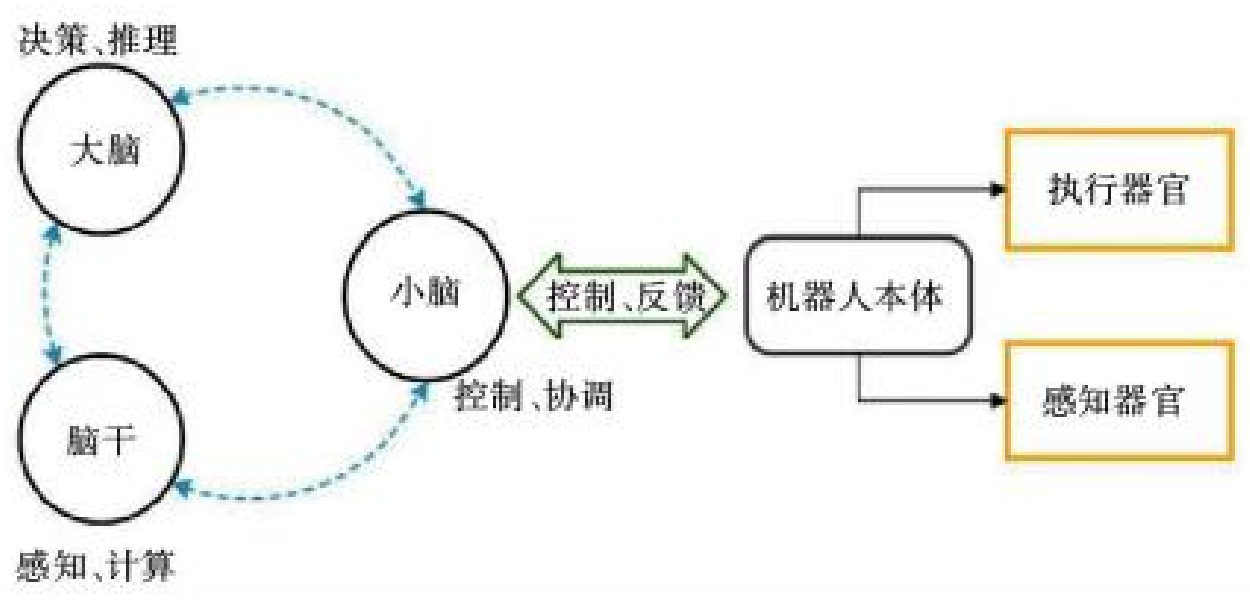
具身智能机器人是将人工智能技术赋予机器人,使机器人像人一样具备周围环境感知、自主规划行进路线、自主完成任务决策执行等功能。具身智能机器人的组成如图 1 所示,包括类似于人脑的结构和可以实现行动的机器人本体。
图1 具身智能机器人结构组成
“大脑(Cerebrum)”是具身智能系统中的核心部分,负责高级认知和决策过程。它是具身智能系统中的智能控制中心,承担着语言处理、图像识别、情感分析、知识存储和推理等高级智能,通过处理感知输入和执行器输出来实现系统的智能行为。
“小脑(Cerebellum)”主要负责运动控制和协调。它接收来自“感觉器官”的输入,监测机器身体的位置、运动和平衡,并生成相应的运动指令,使系统能够实现精确而协调的运动。
“脑干(Brainstem)”是连接“大脑”和“小脑”的部分,它负责基本的信号传输、处理基础感知信息,为“大脑”提供环境感知的输入和行动执行的输出,同时为“小脑”提供必要的感觉反馈和协调控制。
具身智能系统中的机器人本体(Machine Body)是用于实现行动的物理部分,具身智能机器人是具身智能的实体形态,可以是一个机器人,也可以是其他具备运动能力的装置,机器身体通过执行器官(如电机、液压系统等)来实现运动和行为。它接收来自“大脑”和“小脑”的指令,执行相应的动作,并通过感知器官(如摄像头、传感器等)获取环境信息。通过以上部分相互协作,使得具身智能系统能够感知环境、理解任务、做出决策,并通过机器身体实现相应的行动。
具身智能机器人要实现与环境实时交互,并完成自主行动的功能,所涉及的主要环节可以抽象理解为感知、认知、决策、执行,如图 2 所示。将具身智能应用在不同的场景下,能够赋予机器人更高效的执行、决策能力和实践学习的能力。
图2 具身智能机器人功能组成
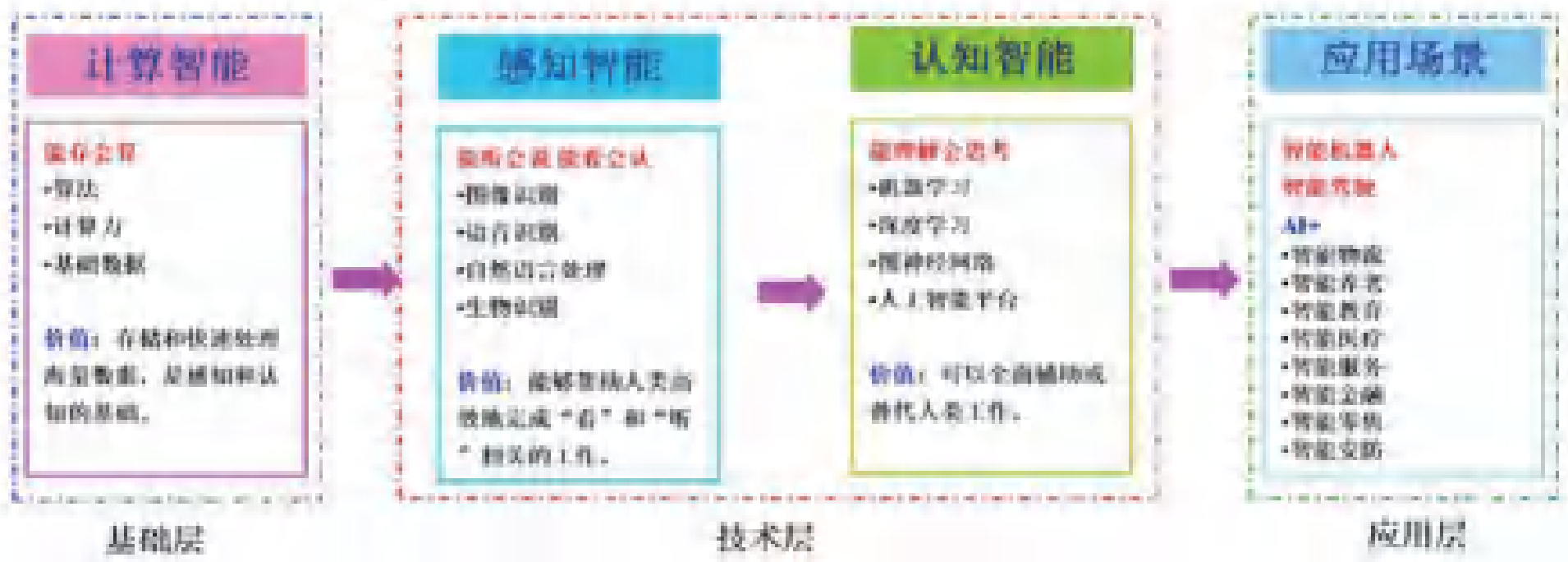
具身智能机器人通过机器身体来构建感知和运动的部分,加之大模型的辅助,使其不仅能够“听懂”人类的语言,还能够按照文本信息去分解,并分步执行任务。这种发展趋势意味着机器人将展现出更多样的外观形态,能够完成各类任务,并且能够更独立地做出决策和行动。具身智能机器人各层次功能和价值体现以及应用场景,如图 3 所示。
图3 具身智能机器人各层次价值以及应用场景
2 具身智能机器人关键技术
具身智能机器人借助人工智能技术的发展,能够更加自主地执行任务,他们可以通过自主导航、路径规划和越过障碍物等手段,自主地完成复杂任务,并通过感知、理解、决策和执行等能力与周围环境进行交互,并根据环境变化做出相应的反应。世界各国对于具身智能的研究已拓展到多个关键领域,成为未来新一代人工智能理论与应用突破的一个重要窗口。当前具身智能机器人的关键技术可分为多模态感知技术、自主学习与决策、运动控制与规划以及人机交互四个方面。
2.1 多模态感知技术
多模态感知技术利用机器人的深度相机、激光雷达、超声波传感器、压力传感器等不同模态信息数据以及多源图像,完成对周围局部环境的扫描和构建,通过目标检测、目标分割技术来构建与周围实际环境的空间映射,形成多模态数据并加以利用,为具身智能机器人感知和认知周围环境提供可靠的数据来源。
图4 多模态预训练模型示意图
2.2 自主决策与学习技术
具身智能机器人像人一样与环境交互感知、自主规划路径、决策并执行任务的关键是拥有一个安全可靠的决策系统。它决定了机器人是否能够根据环境和任务情境建立模型并生成决策,而这其中明确设定机器人的目标行为就显得至关重要。通过人工智能加持的方式,让机器人具备自主决策与社交的能力,可以通过机器人自主产生、人机交互产生、智能体之间交互产生三类方式来生成决策。
2.3 运动控制与规划技术
当前机器人的种类随着机器人的发展不断增多,具身智能机器人也随之发展。具身智能机器人系统为完成任务提供了效率、稳健性,但复杂性也随之提升。机器人的移动导航技术和机械臂的规划控制技术是在运动控制过程中的关键点。
在共享同一工作空间的社会化人机交互中,机器人还需要考虑安全性和人类运动的接合部分。需要实时推断人类未来的运动,并规划出安全、高效、符合社会规范的路径,以确保人类能够长期接受机器人作为合作者的角色,在实现社交导航上面发挥作用。同时,人类也需要充分理解移动操作机器人的行为,以便能够预测其未来的行为。人机交互共融技术将成为移动操作机器人领域的研究重点,以实现更好的交互体验和合作效果。
2.4 人机交互技术
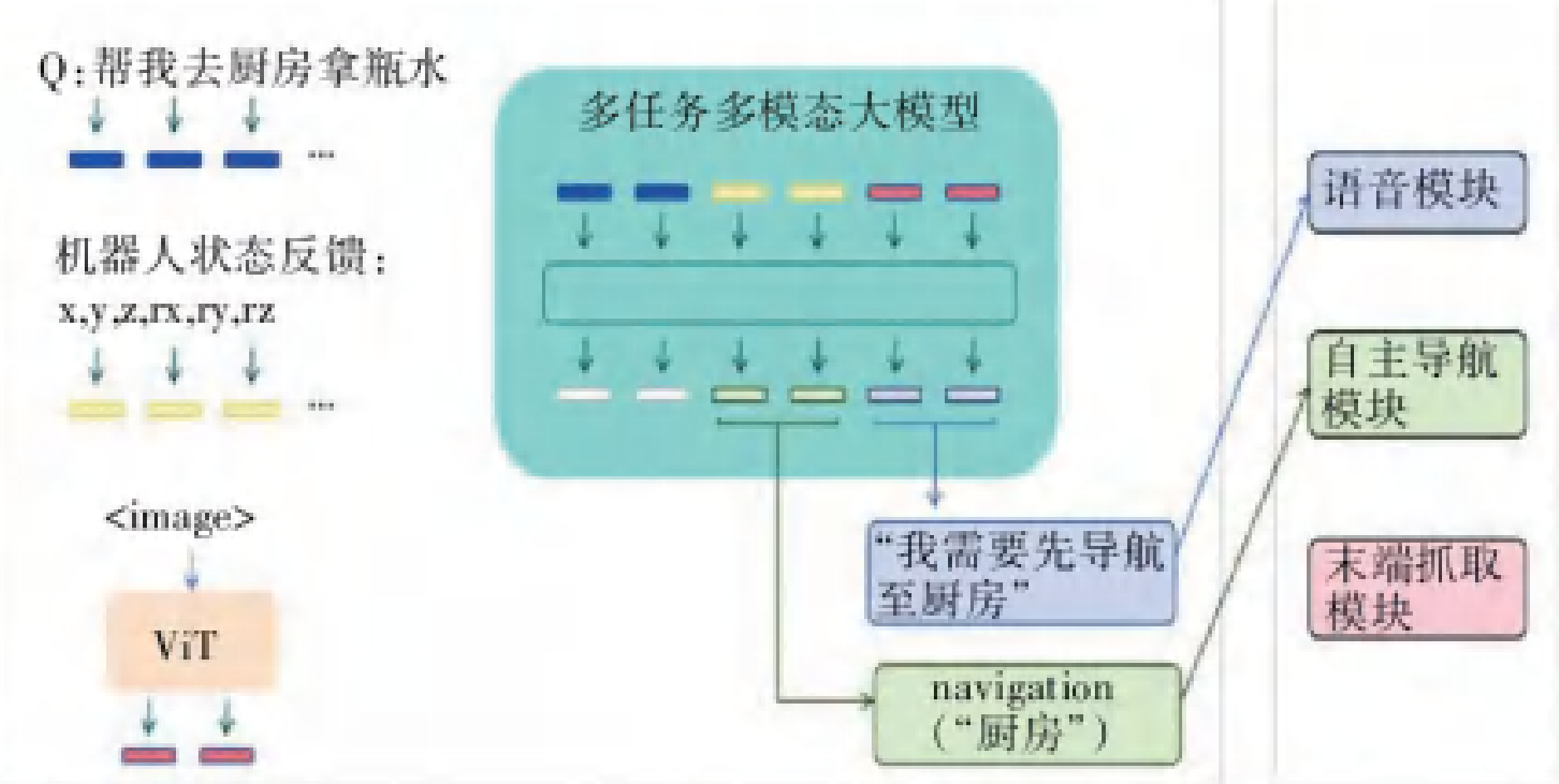
UC Berkeley、波兰华沙大学联合谷歌机器人团队提出了具有大型预训练语言、视觉和动作模型的机器人导航系统(LM Nav),该模型结合了大语言模型(LLM)、视觉和语言模型(VLM)、视觉导航模型(VNM)。从用户语言指令识别,到将指令与机器人视觉感知的外部环境相关联,再到任务执行时导航,全程无需用户注释即可执行自然语言指令。如图 5 所示,用户只需给出指令,基于多任务多模态大模型的具身智能机器人便可以通过语音模块、自主导航模块、机械臂模块等反馈当前的状态并自主执行,进而完成去厨房拿水的任务。
图5 基于多任务多模态大模型的具身智能机器人
2024 年 3 月,美国纽约初创公司 Hume AI 发布了一款名为 EVI 的共情语音接口,该接口具备多项功能,包括识别用户情绪、以人性化语调回应、分析语气是否结束话题、恢复对话等。EVI 基于 Hume AI 自研的移情大模型(eLLM),该模型建立在语义空间理论基础上,通过数据收集和统计模型精准绘制人类情感的全谱图,目前该模型能够检测出 53 种人类情绪。这项突破性技术能够通过用户的声音分析情绪和心理状况,并实时做出回应。Hume AI 的创始人 Alan Cowen 认为 AI 需要情商,预测未来的 AI 互动界面将以语音为基础,同时计划为企业提供 API 接口,将 E-VI 技术应用于信息检索、数字陪伴、工作协助、医疗保健等领域。这一创新标志着人工智能在情感理解和语音交互方面迈出了重要一步,为未来的发展提供了新的可能性。
3 具身智能机器人研究存在的问题及挑战
3.1 环境感知与理解
在感知与认知方面,具身智能机器人主要有如下几个问题亟需解决:
(1)感知的复杂性。复杂的室内或室外环境中,机器人可能会遇到遮挡物、光照变化、噪声干扰等问题,同时也受限于传感器的技术,无法完全模拟人类的感知能力,这会加大对算法的依赖,从而对其环境的准确感知产生影响。
(2)多模态数据融合。不同感知模态的数据具有不同的特征表示和数据格式,如图像、语音、触觉等,将这些异构数据进行有效的融合需要解决数据格式转换、特征统一和归一化等问题。
(3)机器人理解和推理的能力。在复杂多变的真实世界场景中,具身智能机器人需要能够准确理解人类语言的语义和情境,以正确地解释和回应人类的指令和需求。在面对指令,需要通过理解和推理来进行的任务时,目前基于大语言模型的人工智能技术在语义理解和推理仍存在挑战,无法提供合理的认知和任务分解。
3.2 自主决策与学习
目前,具身智能机器人在自主决策与学习方面存在的问题主要有以下 3 个方面:
(1)对数据和样本的需求。获取高质量、多样性的数据集,特别是在特定领域或任务数据不充足的情况下,具身智能机器人的学习与决策可能受到不完全信息、不确定性和多样化的因素影响,进而导致结果的不确定性和不准确性。
(2)迁移学习和泛化能力。在不同环境和任务中的数据分布和特征可能存在差异,导致学习的模型泛化能力不足,难以适应新情境和任务。
(3)自主决策能力薄弱。具身智能机器人在面对新的、复杂的或变化的情境时,无法灵活性和适应性地进行决策。为了提升具身智能机器人的自主决策能力,需要进一步研究和开发具备灵活性、适应性和推理能力的决策模型,这包括更好的情境感知和理解、预训练模型和边缘端优化、增强的学习和迁移能力、处理不确定性和风险的方法,以及机器人与环境、用户和其他智能体之间的交互学习和反馈机制。
3.3 运动控制与规划
具身智能机器人在运动控制与规划方面存在一些技术挑战。
(1)动作规划的复杂性。针对复杂环境中的运动规划,需要考虑到多个因素如目标位置、障碍物避让、路径规划等,需要高效的算法来生成合适的动作序列。
(2)动作执行的稳定性。在实际执行过程中,机器人需要保持动作的稳定性和精确度,考虑到机械结构、传感器误差、环境变化等因素,需要可靠的控制算法来实现准确的动作执行。
(3)运动规划与实时性的平衡。在快速变化的环境中,机器人需要实时做出决策和规划,同时考虑到计算复杂度和实时性之间的平衡,需要高效的算法来实现实时运动规划。
(4)避障与自适应性。机器人需要能够识别和避开障碍物,同时根据环境变化做出自适应的调整,需要强大的感知和决策能力来应对复杂环境。
(5)运动协作与交互。在多机器人系统中,需要实现多机器人之间的协作与交互,协调各个机器人的动作和目标,需要设计有效的协作机制和通信策略。
克服这些技术挑战,需要不断优化算法、提升感知能力、加强控制策略,以实现具身智能机器人在运动控制与规划方面的高度自主性和灵活性。
3.4 人机交互
传统的机器人在人机界面与交互上存在表达不流畅、自然语言理解不准确、自身稳定性灵活性差等问题。
(1)自然语言理解和情感识别与表达。现有的大语言模型(LLMs)在提高人机交互体验、提供高级会话、开放式的用户请求等方面有了一定的进展,LLM 驱动的机器人提高了对复杂的非语言线索的预期,并在建立连接和思考方面表现优异,但在逻辑沟通方面仍存在不足。
(2)机器人身体动作和姿态控制。机器人行为的执行仅限于机器内部预设的交互模型去完成有限的与人类的互动,并且移动机器人需要在人机系统中评估其行为有效性。
以上问题需要综合运用人工智能、机器学习、计算机视觉、自然语言处理等相关技术,并进行跨学科的研究与创新。随着技术的进步和研究的深入,具身智能机器人在交互与人机界面的自然性和互动性将会取得更大的突破。
3.5 数据隐私与伦理
除上述问题外,具身智能机器人的发展还需要考虑数据隐私与伦理的问题。比如安全性和隐私保护,如何采取适当的安全措施,以保护用户的个人信息和敏感数据,并遵守相关的隐私法规和标准。又如伦理决策和责任,在危险情况下,机器人应该如何权衡不同的行动选择?在处理个人信息时,机器人应该如何确保公平和合法的处理?
解决这些问题需要综合考虑技术、法律和伦理等多个层面的因素,并进行跨学科的研究和合作。确保具身智能机器人的安全性和伦理性是一个全球性的挑战,需要各方力量共同努力并制定相关政策和规范,同时不断的监督和评估。
总的来说,AI 下一波浪潮是“具身人工智能”,具身智能的崛起可以赋予机器人实践学习的能力,将会成为未来新一代人工智能理论与应用突破的一个重要窗口。
沈阳消防研究所摘自:邓三鹏 ; 张香玲 ; 王凯 ; 曹宇聪 ; 马传庆 ; 具身智能机器人关键技术及发展趋势研究 . 装备制造技术 .2024,(06):10-18
摘自:《消防科技信息参考》2025年01期(总第21期)
信息来源:本文转载自“消防科技信息网”。据悉,其原始来源为“局信科司科研处科技信息组 作者:管理员”等官方媒体。版权归属原作者,本平台转载仅为行业信息传播,不保证其准确性。如有异议,请联系我们。